当前不少人形机器人、四足机器狗等仍需遥控器操控行走,酷似大号遥控玩具。
若能实现智能伴随功能 —— 自主跟随主人身后、并行侧方乃至引领前行,同步完成负重运输、摄像头跟拍等任务,将大幅升级用户体验,为消费级与企业级场景拓展更多应用空间。
现阶段智能伴随的主流技术主要有两种:一种是视觉方案,另一种是 UWB(超宽带)定位方案。纯视觉方案虽具备直观感知的优势,但存在显著技术局限:摄像头易受环境遮挡形成视觉盲区;多人员场景下,若第三方介入机器人与跟随目标之间,极易引发目标丢失;且当机器人处于目标后方或侧方时,人脸识别功能完全失效,转而依赖背影、衣着体态等特征识别,稳定性欠佳。
在实际应用中,若要构建高稳定性、多场景适配的智能伴随系统,UWB 技术成为关键支撑。作为无线电定位领域公认的最高精度技术,UWB 的应用方式极为便捷:主人仅需随身携带一枚轻巧的 UWB 标签(如苹果AirTag防丢器、汽车钥匙的大小),或直接使用支持UWB功能的手机、手表;同时在机器人本体安装UWB定位锚点,机器人即可通过 UWB 信号实时捕捉主人位置,实现精准、稳定的智能伴随。
当前UWB伴随主要存在以下几类技术路径:
多锚点TOF(飞行时间)定位
在机器人本体上布置至少3个UWB锚点,基于TOF原理计算标签位置。
优点:原理简单,软硬件易于实现。缺点:由于机器人向地面的投影面积有限,多个锚点的间距在水平面上难以拉大(例如50cm以上),定位精度受到影响;锚点数量上升带来成本增加;金属机身对UWB信号遮挡明显,对锚点的位置布局挑战大。
UWB-AOA(到达角)结合TOF定位
利用UWB锚点的天线阵列测量信号到达角度(亦称PDoA,到达相位差),结合TOF测距实现定位。该方案又可细分为:
方案一:单锚点固定式
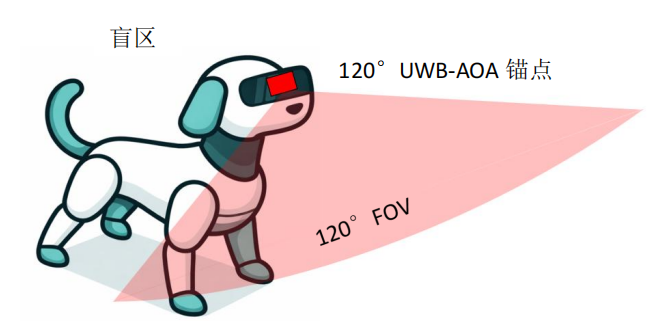
在机器人前方安装一个120°FOV(视场角)的UWB-AOA锚点。此方案软硬件设计难度不算大,但在机器人后方与侧方存在定位盲区,需要主人刻意走到机器人前方才能被定位到,或者机器人主动旋转才能找到主人的位置。此方案可以支持机器人在主人身后的有限自主跟随,但无法让机器人智能伴随在主人侧方甚至走在前方。
方案二:多锚点组合式
在机身不同方位安装多个120°FOV的UWB-AOA锚点,以扩大FOV覆盖范围。但成本和功耗显著提高,模块间协同处理复杂,且仍可能存在盲区。
方案三:旋转扫描式
将一个120°FOV的UWB-AOA锚点安装在电机上,实现类似机械雷达的360°旋转扫描,但在可靠性与安装布局上面临较大挑战,目前已经很少有这种方案落地。
方案四:360°单锚点
采用单个可实现360°FOV的UWB-AOA锚点。此种方案系统简洁、成本可控,但对UWB天线阵列的设计与算法要求非常高,从原型机到成熟可商用还存在很大的鸿沟,目前仅有极少数厂商有实际落地经验,此方案最有应用前景。
全迹科技专注UWB定位近10年,可提供上述方案四。
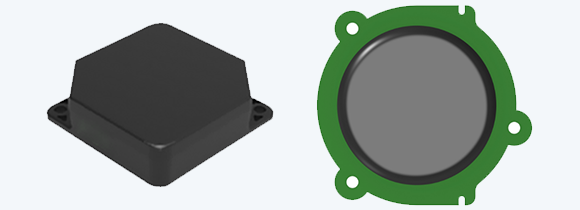
全迹已推出适合机器人智能伴随应用的小型化360°UWB-AOA锚点(型号ONE1000),并配合国内头部机器人初创公司维他动力在Vbot超能机器狗上率先量产落地。
全迹ONE1000具备以下核心特性:
- 单锚点实现360°半球形3D定位;
- 可复用为UWB雷达,检测周围人员存在,用于机器人低功耗休眠唤醒或其他智能交互;
- 除了支持UWB标签外,还可扩展支持UWB手机与手表;
- 特殊天线设计保证了对UWB标签朝向不敏感,佩戴自由,无需刻意固定方向;
- 采用符合最新法规的CH9频段,适用于全球市场;
- 尺寸44mm x 5mm,UART数据接口,单3.3V供电;
- 核心芯片与生产工艺符合车规级标准,具备高可靠性。
全迹 UWB-AOA 技术切实解决了跟随盲区、天线朝向敏感、成本高昂等行业痛点,为机器人智能伴随这一领域的新兴需求提供高可靠性的技术与产品支撑。
- 随机文章
- 热门文章
- 热评文章
- 2025年英国“中文培优”项目来华夏令营在云南开营,2025年英国“中文培优”项目来华夏令营在云南开营
- 浙江衢江港区开启大件设备公水联运业务 首单出口瑞典,浙江衢江港区开启大件设备公水联运业务 首单出口瑞典
- 从无到有 上海十年织就离境退税服务网,从无到有 上海十年织就离境退税服务网
- 海军山东舰航母编队在香港举行甲板招待会,海军山东舰航母编队在香港举行甲板招待会
- 中国科协年会举办防弹防爆复合材料最新进展与应用技术专题论坛,中国科协年会举办防弹防爆复合材料最新进展与应用技术专题论坛
- 上半年广州海关检疫监管出口荔枝2818.6吨,上半年广州海关检疫监管出口荔枝2818.6吨
- 喝有水垢的水容易得肾结石……是真是假?,喝有水垢的水容易得肾结石……是真是假?
- 英国王妃凯特谈抗癌经历:必须“勇敢面对”,英国王妃凯特谈抗癌经历:必须“勇敢面对”
- 甘肃民勤建“科技小院”守大漠“粮仓”,甘肃民勤建“科技小院”守大漠“粮仓”
- 广西统筹城乡发展 加快构建房地产发展新模式,广西统筹城乡发展 加快构建房地产发展新模式
- 迎战特大暴雨 山西晋中“橙色力量”的20个小时,迎战特大暴雨 山西晋中“橙色力量”的20个小时
- 探秘全球首艘智能研究实训船:边航行边升级,探秘全球首艘智能研究实训船:边航行边升级
- 1非银金融行业跟踪周报:保险资负管理新规征求意见;继续看好保险股
- 2连跌五年 曾经的优等生白酒怎么了?行业何时能走出调整泥潭
- 3北方稀土跌0.52% 机构净卖出4.01亿元
- 4整流桥GBJ2002和GBJ3002,有什么区别?
- 5紧跟国家“双碳”战略,安科瑞助力园区绿色升级
- 6与作者面对面丨英飞凌IPAC直播间即将亮相PCIM Asia 2025
- 7东周时期贵族饮食考古发现:女性食源多样肉食明显低于男性,东周时期贵族饮食考古发现:女性食源多样肉食明显低于男性
- 82025CJ直击:骁龙是如何从游戏芯到全能王的?
- 9浙江宁波机场口岸上半年出入境外籍旅客同比增长87%,浙江宁波机场口岸上半年出入境外籍旅客同比增长87%
- 10钙钛矿助力Micro-LED发展:从材料突破到显示应用
- 11入选沙利文白皮书行业标杆!华宝新能全场景家庭绿电解决方案亮相AIA 25 Expo
- 12疆鸿智能PROFIBUS转光纤:破解轨道交通信号传输困局的可靠之选
- 1安乃达(603350):首次公开发行部分限售股上市流通
- 2数字化工厂-注塑机数据采集、边缘计算
- 3白银站稳32:多重利好共振下的反弹能否持续?
- 4韩国总统李在明涉华表态:将尽快改善韩中关系,韩国总统李在明涉华表态:将尽快改善韩中关系
- 5金证股份(600446):金证股份第八届董事会2025年第六次会议决议
- 6ST盛屯股东户数下降6.18%,户均持股19.61万元
- 7EBC金融集团外汇行情播报|欧股仍然承压 奢侈品不香了
- 8光储充一体化构建绿色能源与智能交通的交汇点
- 9奥飞数据拟募资不超17.5亿元建设云计算产业园
- 10慧能泰推出零外围A+C快充芯片HUSB382D
- 11一季度超七成混基正收益 鹏华碳中和主题混合涨60%
- 12江西首座“光储充放检调”一体超级充电示范站投运,江西首座“光储充放检调”一体超级充电示范站投运